VERL 框架看 GRPO 过程
GRPO 流程
for each epoch:
for each batch:
##记batch为B
## 生成阶段
给定prompt/query生成n个不同响应
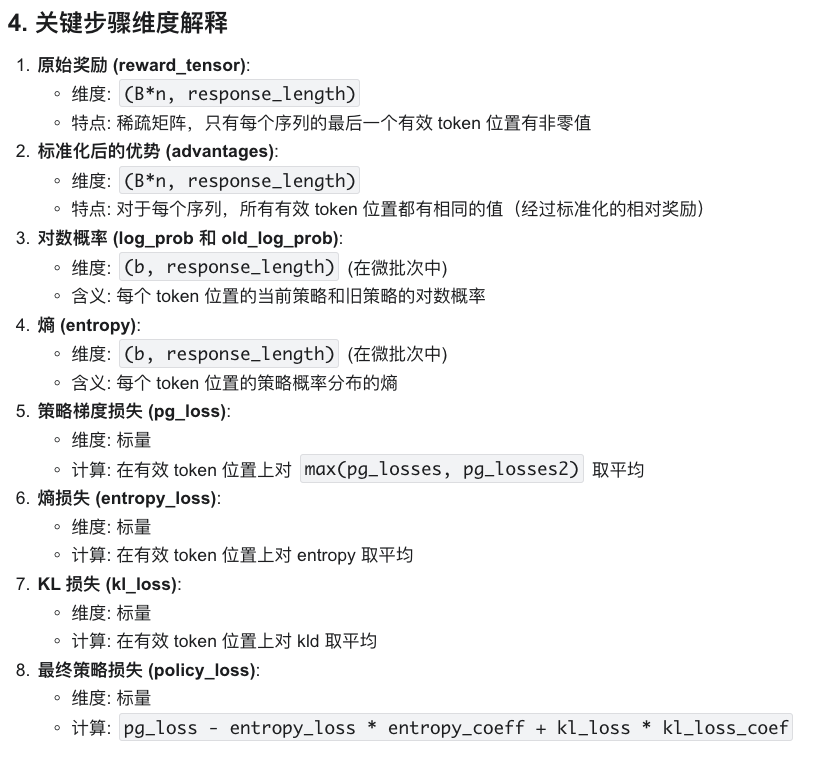
对响应生成计算奖励reward_tensor,维度为(B*n, response_length),只有最后一位token是非零奖励值。
以同个prompt/query生成的响应作为一组,计算相对奖励A,这使得每个响应的奖励长度都是respnse_length,且每一位都是相同的值A。
##优化阶段
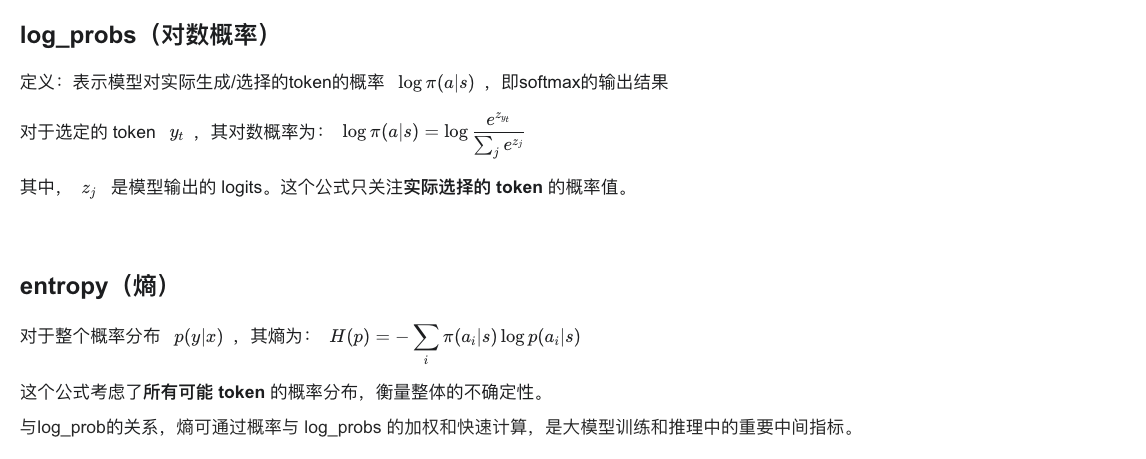
将query和answer拼在一起,送入llm,获取对数概率log_probs,记为ref_logprobs,维度为 B*n *(query_length+response_length),但只截取respnse_length的长度部分
for each PPO_epoch:
打乱样本顺序并创建mini-batches,记为b
for each mini-batch:
将query和answer拼在一起,送入llm,获取对数概率log_probs,维度为 b *(query_length+response_length),但只截取response_length的长度部分
计算策略梯度损失(pg_loss);标量
计算熵损失(entropy_loss),用于维持探索性;标量
计算KL损失,用于控制策略更新幅度;标量
组合损失 total_loss = pg_loss + c2*entropy_loss + c3*kl_loss。
反向传播更新模型参数
其中公式解释
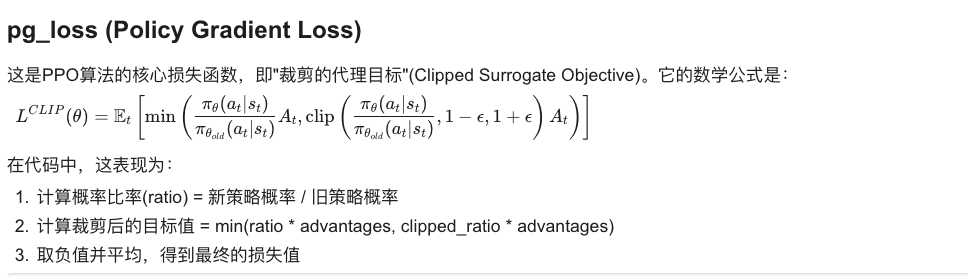
ratio = torch.exp(negative_approx_kl)
pg_losses = -advantages * ratio
pg_losses2 = -advantages * torch.clamp(ratio, 1.0 - cliprange, 1.0 + cliprange)
pg_loss = verl_F.masked_mean(torch.max(pg_losses, pg_losses2), eos_mask)
KL Penalty
kl_penalty 通过惩罚当前策略与参考策略(通常是旧策略)的差异,防止过大的策略更新。
函数参数
logprob: 当前策略下 token 的对数概率ref_logprob: 参考策略下相同 token 的对数概率kl_penalty: 选择使用哪种 KL 散度计算方法
代码实现及其数学公式
- 最简单的方式,是一种简化的近似,数学公式为:
if kl_penalty == "kl":
return logprob - ref_logprob
- **常用的方式,**是基于 Schulman 2020 年博客的实现,数学公式为:
if kl_penalty == 'low_var_kl':
kl = ref_logprob - logprob
ratio = torch.exp(kl)
kld = (ratio - kl - 1).contiguous()
return torch.clamp(kld, min=-10, max=10)
advantage 的计算
回答:在上面的损失函数中出现了 A 这一项,即 advantage,那么怎么计算它呢?
GRPO 将同一提示的不同回答视为一组,通过标准化使得优势估计更加稳定,并且对不同难度的提示更加公平。
对于同一个 prompt
其中:
NOTE(sgm): this implementation only considers outcome supervision, where the reward is a scalar.
def compute_grpo_outcome_advantage(token_level_rewards: torch.Tensor,
eos_mask: torch.Tensor,
index: torch.Tensor,
epsilon: float = 1e-6):
"""
Compute advantage for GRPO, operating only on Outcome reward
(with only one scalar reward for each response).
Args:
token_level_rewards: `(torch.Tensor)`,这个就是奖励,会在下一个部分中的reward_tensor
shape: (bs, response_length)
eos_mask: `(torch.Tensor)`
shape: (bs, response_length)
Returns:
advantages: `(torch.Tensor)`
shape: (bs, response_length)
"""
response_length = token_level_rewards.shape[-1]
scores = token_level_rewards.sum(dim=-1)。#对最后一个维度respnse_length求和,得到序列的总奖励,故而最后形状是(bs,),每个元素对应一个序列的总奖励。
# 按prompt的ID分组,收集同一prompt的不同响应的奖励
id2score = defaultdict(list)
id2mean = {}
id2std = {}
with torch.no_grad():
bsz = scores.shape[0]
for i in range(bsz):
id2score[index[i]].append(scores[i])
## 对每组计算均值和标准差
for idx in id2score:
if len(id2score[idx]) == 1:
id2mean[idx] = torch.tensor(0.0)
id2std[idx] = torch.tensor(1.0)
elif len(id2score[idx]) > 1:
id2mean[idx] = torch.mean(torch.tensor(id2score[idx]))
id2std[idx] = torch.std(torch.tensor([id2score[idx]]))
else:
raise ValueError(f"no score in prompt index: {idx}")
## 标准化分数
for i in range(bsz):
scores[i] = (scores[i] - id2mean[index[i]]) / (id2std[index[i]] + epsilon)
scores = scores.unsqueeze(-1).tile([1, response_length]) * eos_mask
##这个unsqueeze直接把 维度为b的tensor,变成了维度为b*response_length,且这个扩展出来的位置值大小都是一样的;eos_mask时因为不同回答长度不一样,故而要做一个padding。
return scores
奖励的实现
回答:在知道 advantage 公式之后,那么标量奖励是怎么计算的
在 verl.trainer.main_ppo.TaskRunner.run 中有 reward_fn 设置了 reward 的类实现。
奖励计算的流程为:
- 首先对大模型生成的 response token ids 进行解码,得到文本字符串
- 然后根据不同任务的特点,从解码后的文本中提取答案(如使用正则表达式查找特定格式)
- 将提取的答案与正确答案(ground_truth)进行比较
- 最后,生成一个稀疏奖励张量,将分数只赋值给最后一个有效 token 位置,其余位置为零,得到 reward_tensor,也就是上面的 token_level_rewards。
# decode
##1.首先对大模型生成的 response token ids 进行解码,得到文本字符串
prompt_str = self.tokenizer.decode(valid_prompt_ids)
response_str = self.tokenizer.decode(valid_response_ids)
## 2.然后根据不同任务的特点,从解码后的文本中提取答案(如使用正则表达式查找特定格式)
ground_truth = data_item.non_tensor_batch['reward_model']['ground_truth']
data_source = data_item.non_tensor_batch['data_source']
extra_info = data_item.non_tensor_batch.get('extra_info', None)
......
## 3.将提取的答案与正确答案(ground_truth)进行比较,获得奖励reward
reward = self.compute_score(
data_source=data_source,
solution_str=response_str,
ground_truth=ground_truth,
extra_info=extra_info,
reward_type=self.config.data.reward_type
)
if self.config.data.execution_error_penalty and data_item.batch['execution_passes'].item()==0:
reward-=0.5
## 4.最后,生成一个稀疏奖励张量,将分数只赋值给最后一个有效 token 位置,其余位置为零
reward_tensor[i, valid_response_length - 1] = reward
Disccussion
- 为什么 verl 框架不直接以 batch 作为更新单位,而要向下拆出 mini_batch 作 policy model 的梯度更新单位呢?
答:?
- 为什么计算奖励的时候,要用一个只有 1 位不是 0 的 reward_tensor 来存储 reward,而不是用一个标量直接存储 reward?
答:可能是 verl 框架为了兼容 PRM,PRM 会对不同位置的 token 打分。
- ORM(Outcome Reward Model)是在生成模型中,对生成结果整体打分评估。
- PRM(Process Reward Model)是在生成过程中,分步骤对每一步进行打分的更细粒度奖励模型。
更加详细的 GRPO 完整流程(含维度信息)
- 整体训练循环结构
for each epoch:
for each batch B: (每个batch包含多个prompt)
- 生成阶段
# 1. 生成响应
给定 prompts,维度为 (B, prompt_length)
使用 actor 模型生成 n 个响应,每个 prompt 产生 n 个不同响应
- 结果 responses 维度: (B*n, response_length),其中 B 是原始批次大小,n 是每个 prompt 生成的响应数
# 2. 计算原始奖励
生成稀疏奖励 reward_tensor,维度为 (B*n, response_length)
- 对于每个响应,只有最后一个有效 token 的位置有非零奖励值
- reward_tensor[i, valid_response_length[i]-1] = score[i]
# 3. 计算参考策略的对数概率(如果启用)
将 prompt+response 送入参考策略模型
- 获取 ref_log_prob,维度为 (B*n, response_length)
# 4. KL惩罚应用(如果启用)
如果配置了使用 KL 惩罚:
- 计算 KL 散度:kld = log_probs - ref_log_probs,维度为 (B*n, response_length)
- 应用 KL 惩罚:token_level_rewards = token_level_scores - beta * kld,维度为 (B*n, response_length)
否则:
- token_level_rewards = token_level_scores,维度为 (B*n, response_length)
# 5. 计算 GRPO 优势
token_level_rewards 维度: (B*n, response_length)
eos_mask 维度: (B*n, response_length)
index 维度: (B*n),标识每个响应对应的原始 prompt ID
a. 首先计算每个序列的总奖励
scores = token_level_rewards.sum(dim=-1),维度: (B*n)
b. 按 prompt ID 分组
对于每个不同的 index 值,收集所有对应的 scores
c. 对每组计算均值和标准差
id2mean[idx] = mean(scores for prompt idx)
id2std[idx] = std(scores for prompt idx)
d. 标准化每个组内的分数
scores[i] = (scores[i] - id2mean[index[i]]) / (id2std[index[i]] + epsilon),维度: (B*n)
e. 将标准化后的分数扩展到每个序列的每个有效位置
scores = scores.unsqueeze(-1).tile([1, response_length]) * eos_mask
- 将 (B*n) 维度扩展为 (B*n, response_length)
- 最终 advantages 维度: (B*n, response_length),每个序列的所有有效 token 位置都有相同的优势值
- GRPO 的核心特性
GRPO (Group Relative Policy Optimization) 的核心特点是将同一个 prompt 生成的多个响应视为一个组,并在组内进行相对评估:
这种设计特别适合于工具使用、问答等任务,其中不同问题的绝对奖励值可能差异很大,但我们更关心相对改进。